Hydroglisseur modulable radiocommandé
![]()
![]()
Afin de compléter l'activité avec le char à voile radiocommandé, notamment lorsqu'il n'y a pas ou peu de vent, je souhaitais expérimenter un appareil utilisable sur le sable et sur l'eau. Après quelques recherches sur internet, je n'ai trouvé que deux matériels susceptibles de répondre à mes critères, l'aéroglisseur et l'hydroglisseur.
Le premier glisse sur l'air, le second sur l'eau. L'aéroglisseur est plus polyvalent, car le coussin d'air généré permet la sustentation de l'appareil et donc supprime la friction avec les éléments au sol (terre, cailloux, eau, neige ..... L'hydroglisseur se déplace lui en contact direct avec l'eau.
L'aéroglisseur est plus complexe à réaliser, notamment la jupe qui permet de maintenir l'air sous pression sous l'appareil afin d'obtenir la portance nécessaire à son déplacement sans frottement avec les éléments au-dessus desquels il évolue. De plus en matière de modélisme il nécessite au minimum deux moteurs.
Mon choix s'est donc porté sur le plus simple à réaliser, l'hydroglisseur. Toutefois afin de pouvoir l'utiliser sur le sable il fallait l'aménager avec un système roulant.
Cette page présente différentes étapes de la construction de mon hydroglisseur. Une première étape avec la réalisation d'un prototype dont le système de propulsion devait être réutilisable avec le minimum de modifications sur le modèle définitif.
Je me suis inspiré de différentes vidéos vues sur internet.
Le prototype.

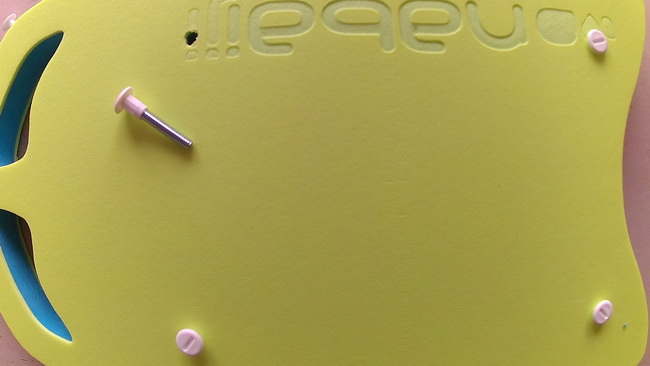
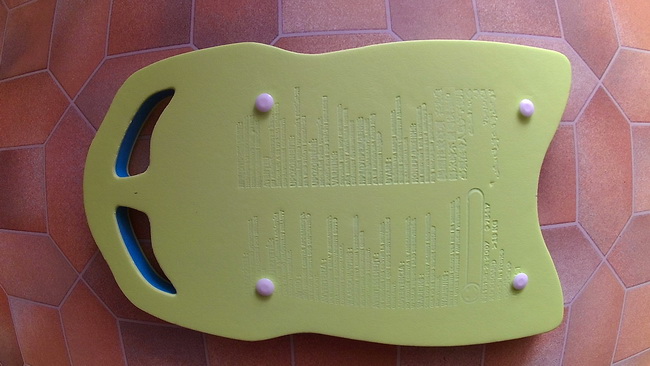
Quelques accessoires, la planche à découper comme support de la motorisation, la planche de natation comme flotteur du prototype. Et bien sûr de la visserie, des rondelles, boulons, écrous, des rivets, des charnières ....
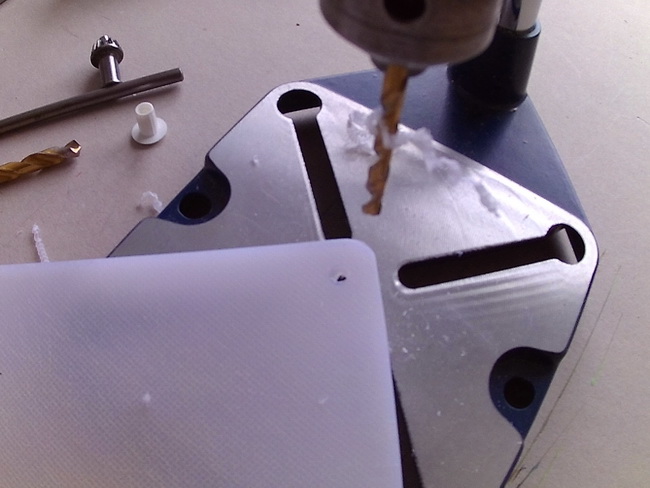
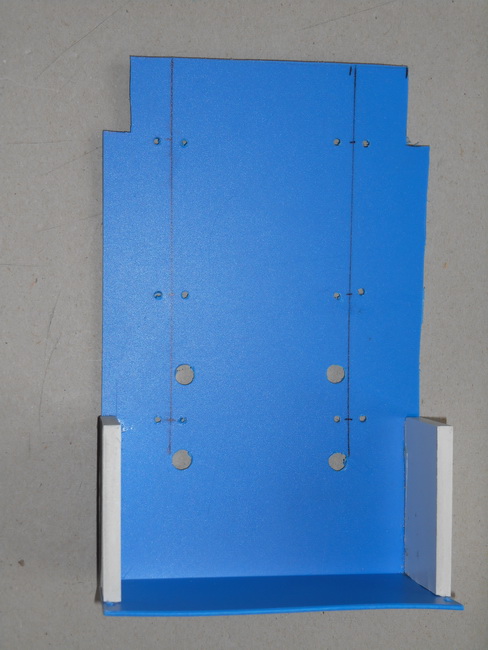
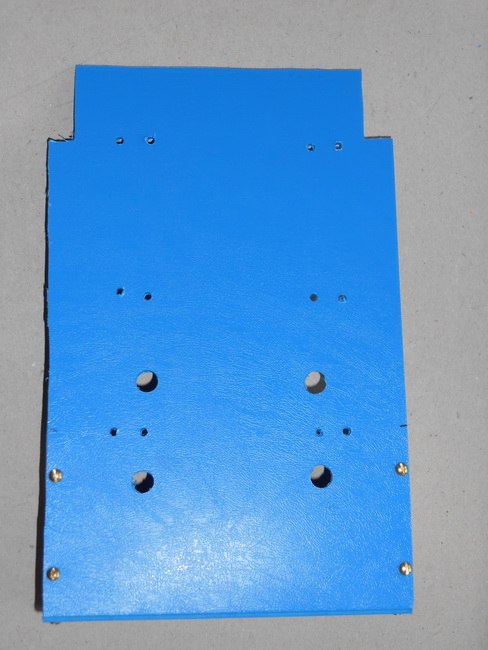
Positionnement de la plaque de découpe et des dérives.


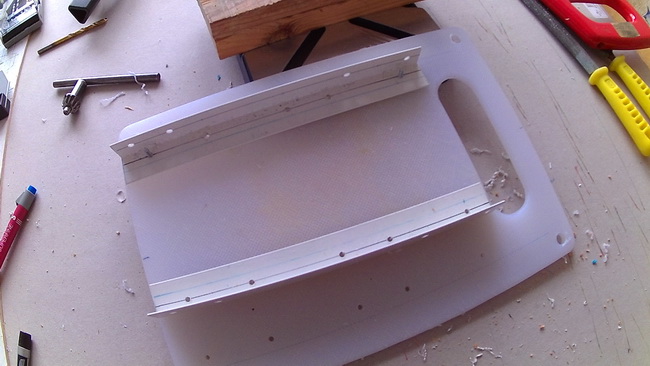


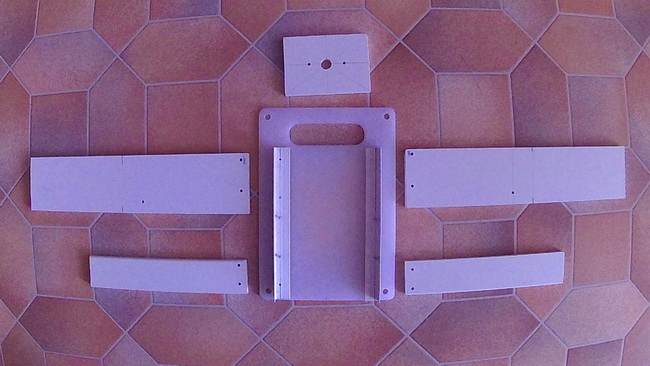
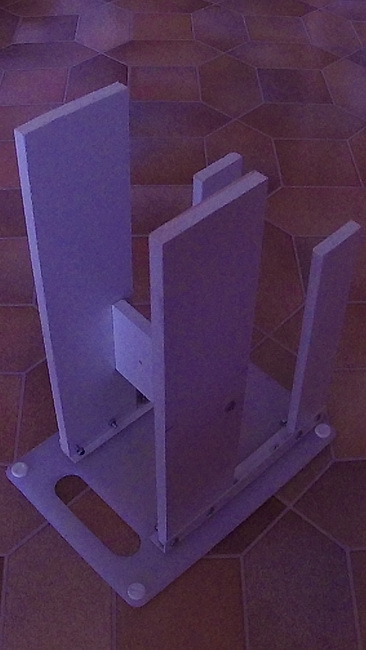
Pour la fabrication du support de l'ensemble de propulsion, j'ai utilisé des équerres en plastique et du PVC rigide expansé (FOREX ou KOMACEL).

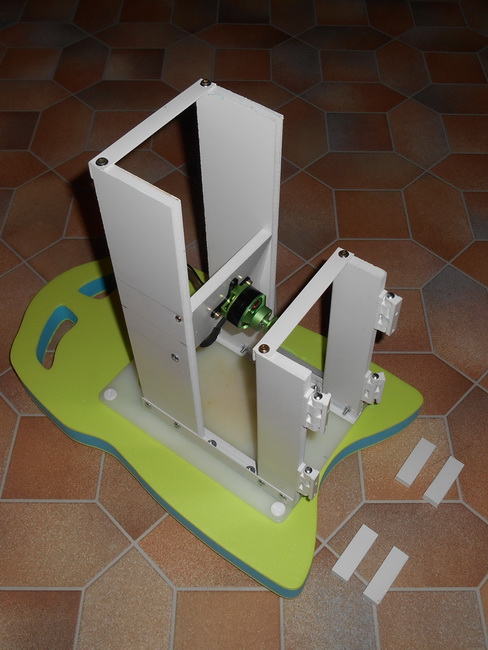
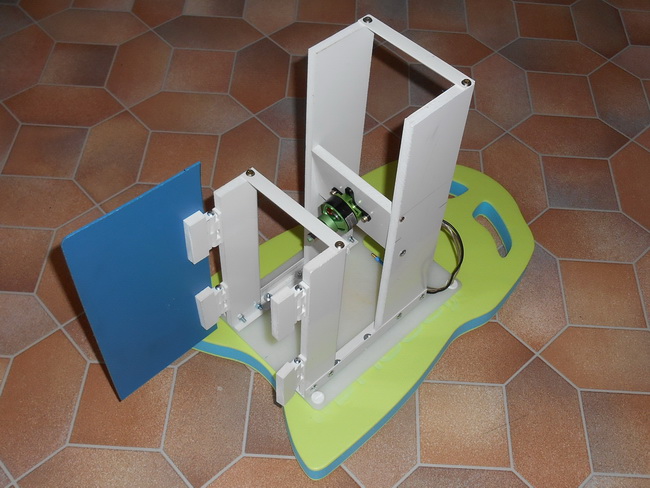
Le prototype dans sa version marine.

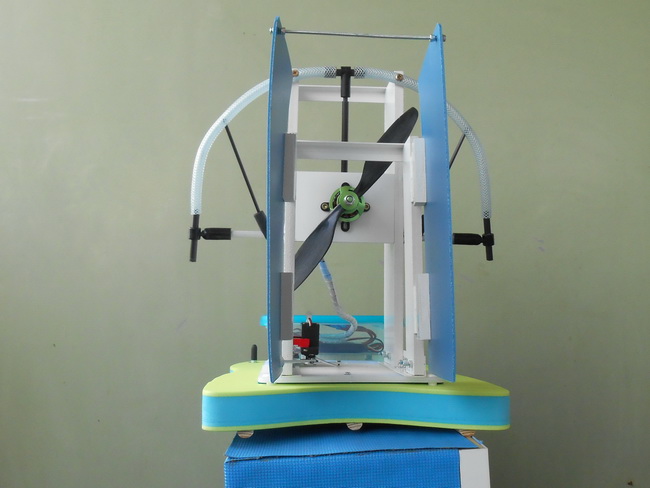

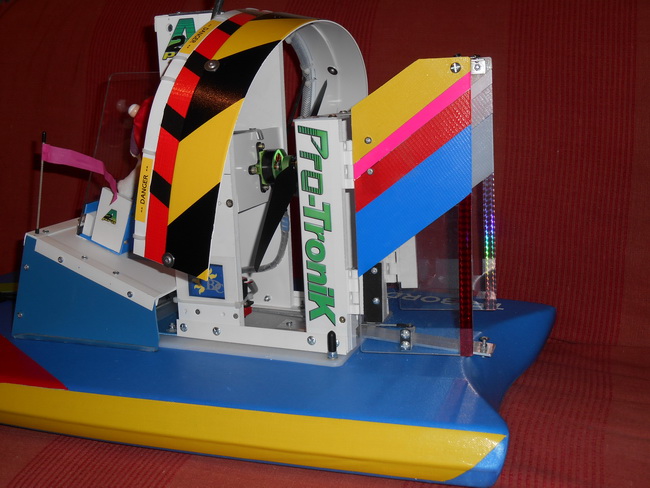
Pour la propulsion, j'ai utilisé des éléments en ma possession (composants en provenance d'un ancien multi rotor démantelé).
Moteur brushless PRO-TRONIK DM 2810 1000 Kv avec hélice APC 10 x 5 ", ESC PRO-TRONIK Black Fet series 45A. Récepteur HITEC OPTIMA avec une radiocommande HITEC OPTIC 6 modifiée en 2.4 Ghz avec un module HITEC SPECTRA.
Pour les volets de direction un servo FUTABA S3003.
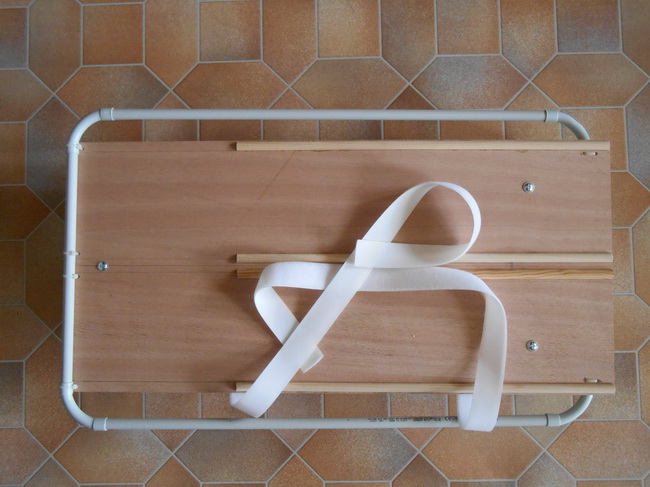
Le module terrestre du prototype.
Mon souhait était d'obtenir sur le sable un comportement proche de celui sur l'eau, avec des glissades de l'arrière. Pour cela, j'ai utilisé des roulettes pivotantes à 360 °.

Les essais du prototype en version terrestre auront lieu sur un parking. Résultat tout à fait conforme à mon attente. Par contre, c'est douloureux pour les roulettes. De toute façon sur le sable il faudra trouver autre chose. Il sera nécessaire d'élargir le positionnement des roues arrière afin d'éviter que l'appareil ne se couche dans les virages trop serrés.
Sur l'eau, je n'ai pas pu tester à grande vitesse, car la planche de natation est trop étroite par rapport au support de propulsion. Le centre de gravité est trop haut, et dans le cas d'un courant latéral, l'appareil à tendance à se coucher. De plus le poids de l'ensemble propulsion positionne la ligne de flottaison au 3/4 supérieur de l'épaisseur de la planche.

Vidéo des essais du prototype.
les 7 et 8 octobre 2016.
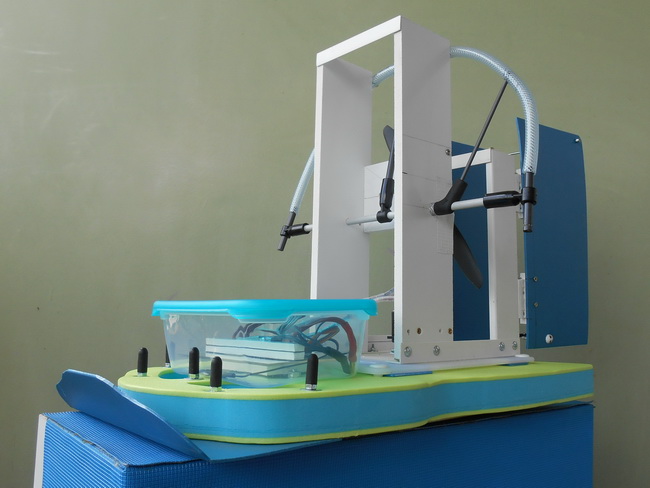
Modification pour le modèle définitif.
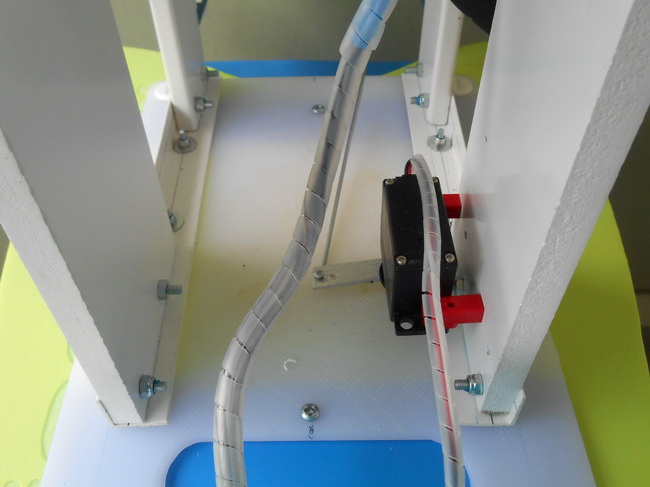
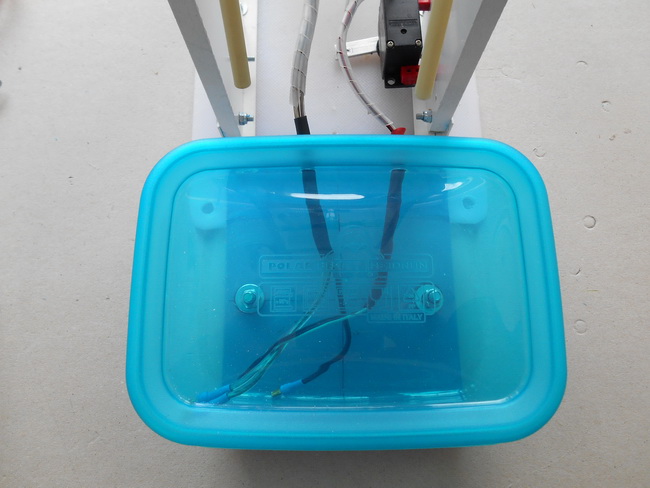
Mise en place d'un support fixé sur la planche de découpe pour placer la boîte étanche qui reçoit le récepteur, le contrôleur (ESC) et l'accu. Cela permet le déplacement de l'ensemble de propulsion en une seule opération. Sur le prototype, ces éléments étaient assemblés séparément.
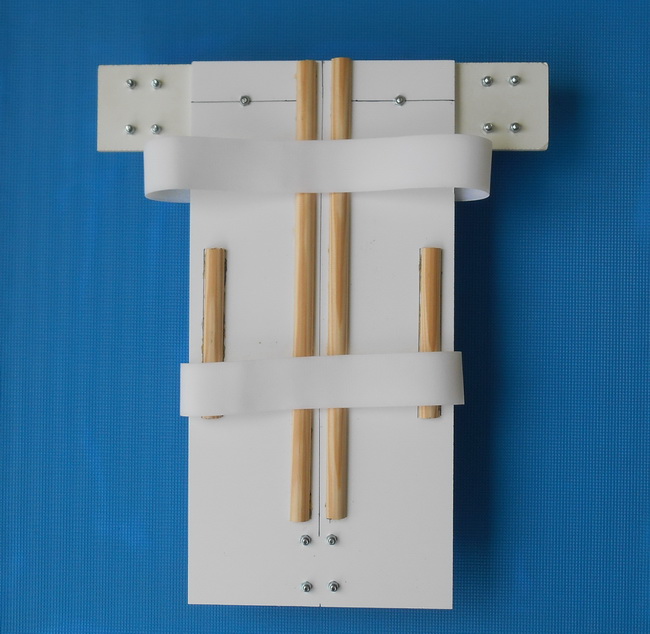
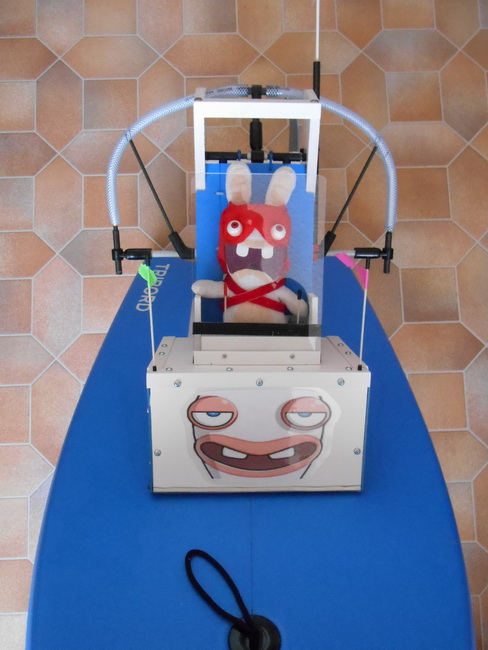
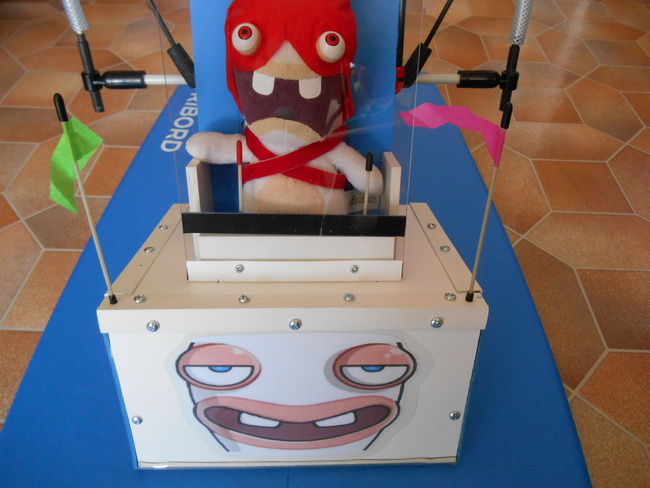
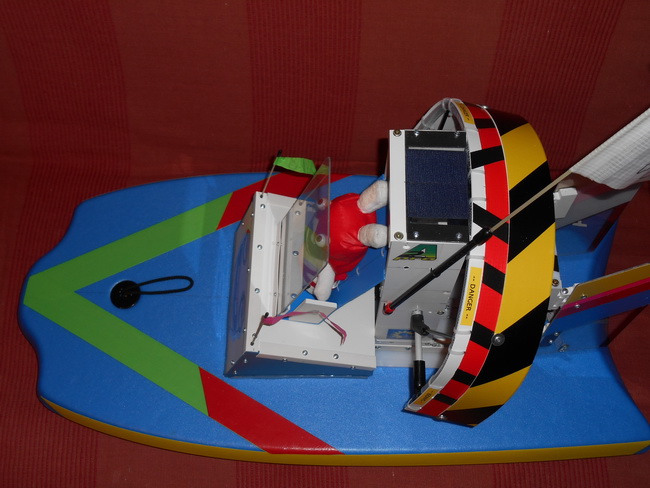
Un siège pour le pilote de l'hydroglisseur et installation du support sur le devant de la motorisation.
Le pilote.




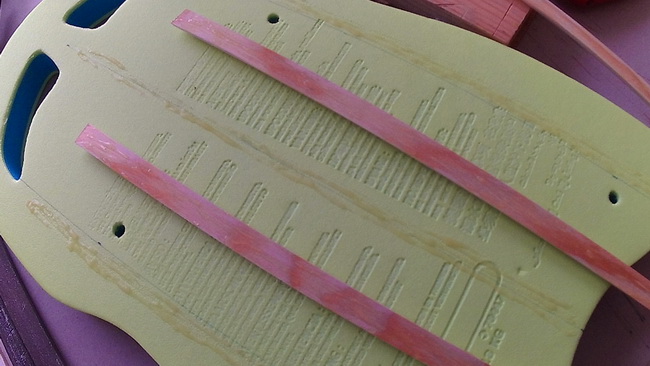
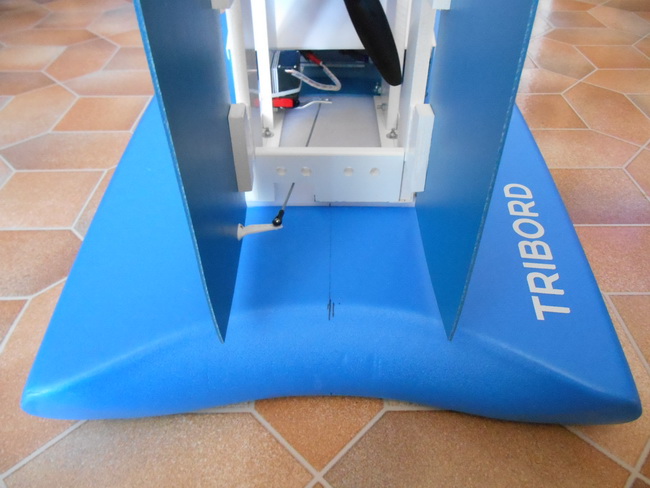
Collage des dérives sous le nouveau flotteur.

Sardine, notre chatte, est toujours intéressée par ce qui se passe. Mais là, elle n'a pas l'air très inspirée.

Le module terrestre.
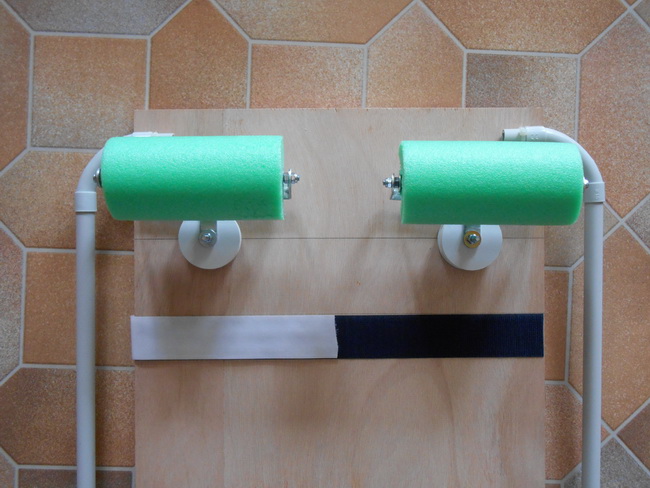
Pour les roues, j'utilise une frite en mousse (accessoire de piscine). Il suffit de la tronçonner et de l'intégrer dans des équerres pour faire un support acceptable. Pour le premier essai j'ai coupé trop large, et placé l'équerre trop en arrière de l'axe du pivot, cela rend difficile la rotation du rouleau.



Pour le mouvement circulaire, j'utilise un disque en téflon (patin de meuble) sur un disque plastique, mais cela ne vaut pas un bon roulement à billes. Même si le sable dans les roulements ce n'est pas terrible.













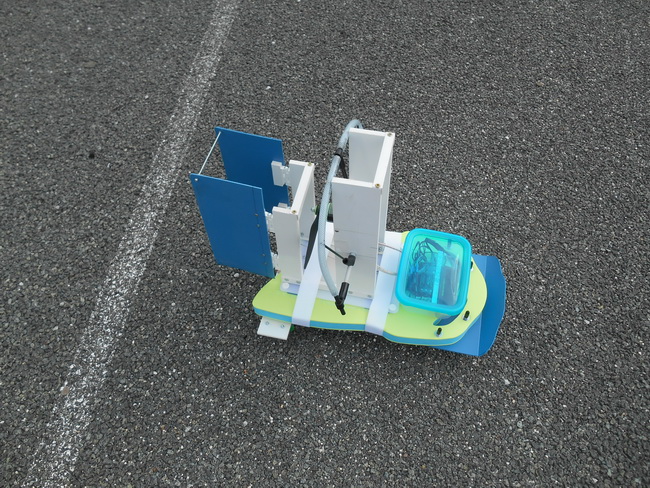
Première utilisation du modèle définitif.
Plage de GRAND VILLAGE - ile d'OLÉRON(17) le 14 octobre 2016.
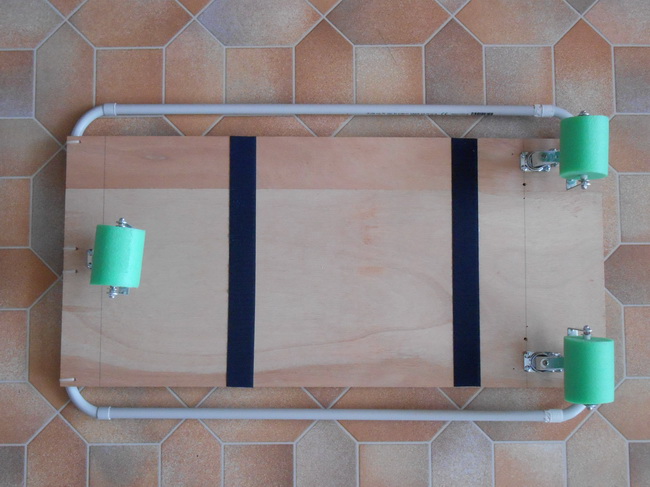
Le module terrestre première modification.
Diminution de la largeur des rouleaux, toujours avec le système de rotation téflon sur plastique.
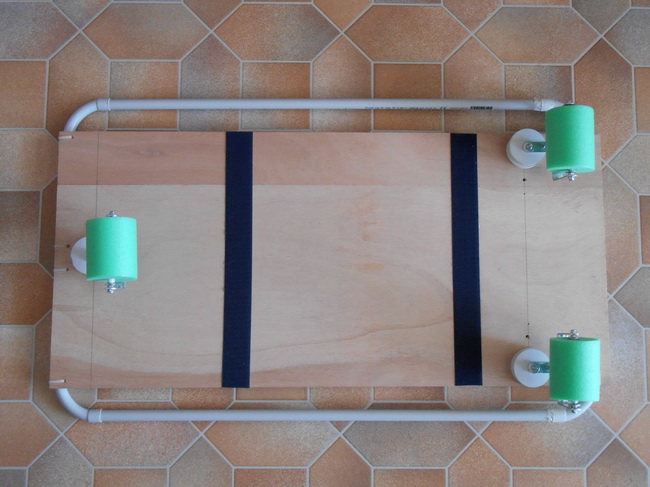


Le module terrestre deuxième modification.
Remplacement du système de rotation, utilisation du support des roulettes du système du prototype, pour y intégrer le rouleau en mousse. Cela me permet de le repositionner au plus proche de l'axe de pivotement.




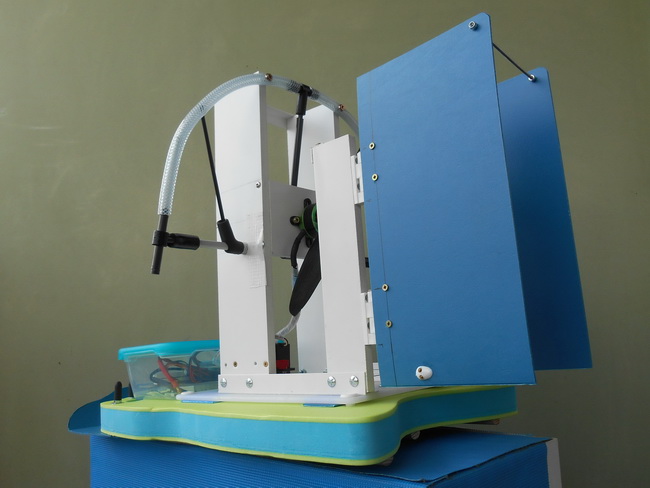
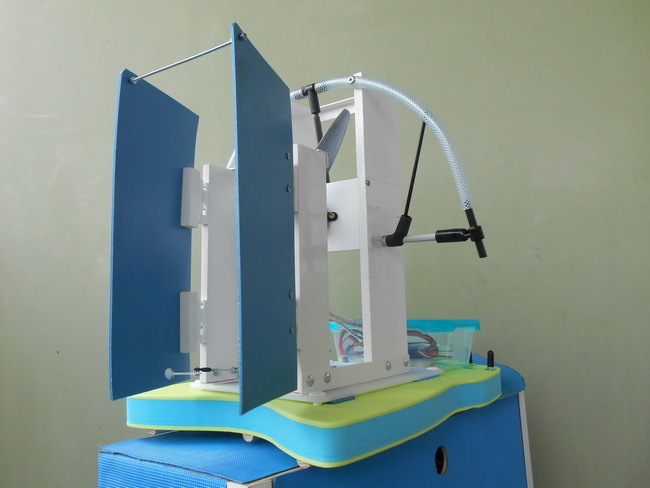
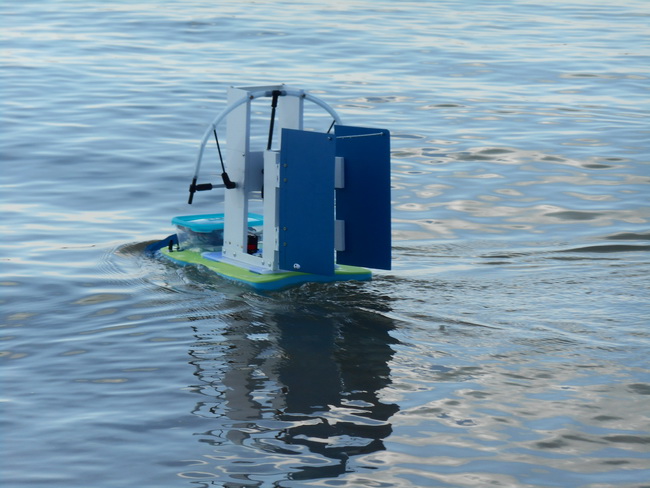
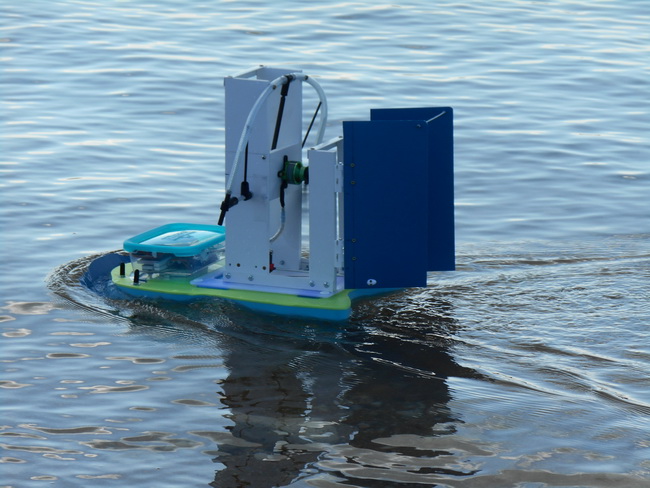
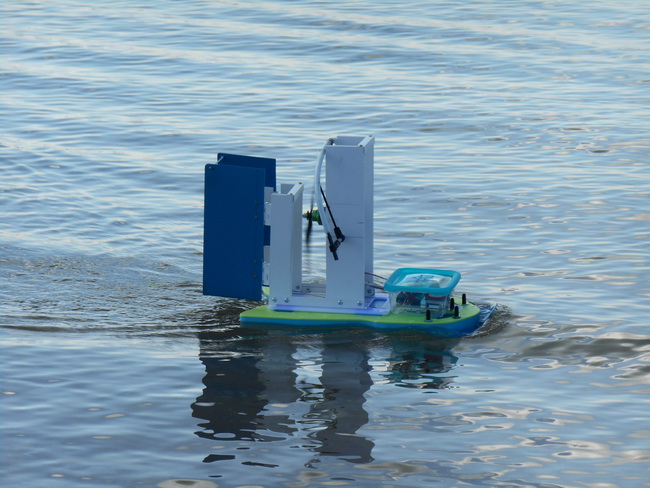
Le modèle pratiquement terminé.

Sur la photo ci-dessous, on peut voir sur le support moteur la tige filetée qui permet d'incliner (avant/arrière) le moteur de façon à diriger le flux d'air. Cela permet en utilisation marine d'enfoncer ou l'alléger l'arrière de l'hydroglisseur.

Lors des essais en mer, il s'avère que l'hélice APC 10 x 5 " est d'une grande fragilité, particulièrement lors du passage latéral dans les vagues. La submersion partielle plus ou moins importante du flotteur provoque la destruction de l'hélice, si celle-ci est en rotation à vitesse élevée.
Elle sera remplacée par une hélice GRAUPNER E-PROP 11 x 5 ".
Vidéo de l'hydroglisseur dans sa configuration au 28 octobre 2016.
Vidéo des deux hydroglisseurs en fin de la page de l'hydroglisseur tri moteur.
Cliquez sur la photo ci-dessous pour accéder directement la page.

Le 28 novembre 2016.

Caractéristiques :
Poids 3050 grammes hors accu.
Dimensions hors-tout
Longueur : 90 cm Largeur : 45 cm Hauteur : 40 cm
Le 21 décembre 2016



Photos et vidéos BDC HENRI.
![]()
![]()