Cerf-volant radiocommandé
Phase IV
Le Rotexa
![]()
![]()
Le Rotexa est un cerf-volant qui a la particularité de tourner autour de son axe. C'est assez sympa, mais le mien à tendance à se promener quand même un peu trop.
C'est donc le modèle ci-dessous qui fait l'objet de la nouvelle expérience de motorisation.


BD056 12/1995
Longueur : 125 cm Poids : 800 grs
SPI / CARBONE
Type : ROTEXA statique mono fil
Installation motorisation sur le Rotexa.

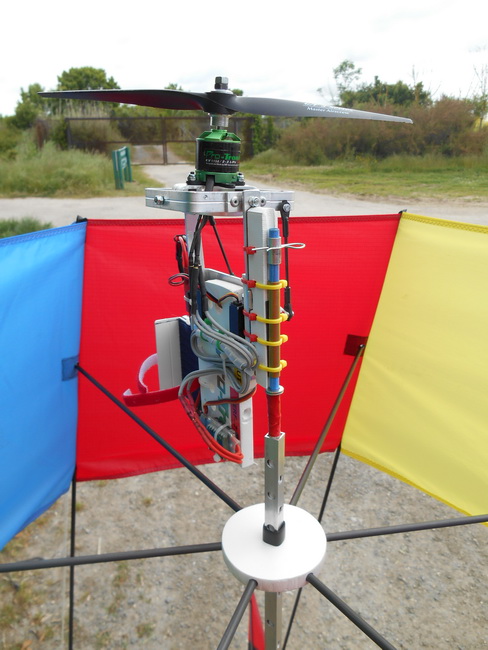

Sur la photo du centre, le Rotexa est en position verticale. Si le moteur est activé dans ce contexte, l'ensemble moteur se met en rotation autour de son axe, il s'agit du couple de renversement. C'est l'effet de couple (loi de Newton action = réaction ). Principe parfaitement contrôlé sur les hélicoptères par l'action contraire provoquée par le rotor anticouple, par l'utilisation de rotors principaux contrarotatifs, ou le système NOTAR (Propulsion d'air qui est éjecté latéralement dans la poutre de queue).



Ci-dessous les photos de la motorisation.
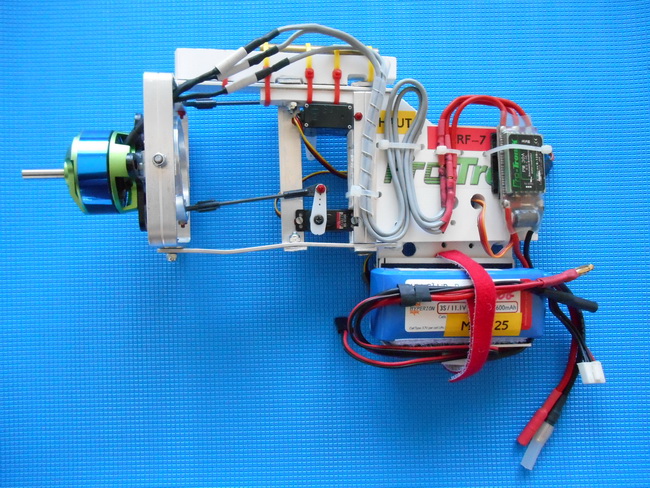

Sur la photo droite ci-dessus, il manque le récepteur RC, qui est actuellement utilisé sur un autre prototype de ce qui pourrait être la phase 5 des expériences des cerfs-volants radiocommandés.
Les servos que j'ai utilisés ne tiennent pas au choc lors des atterrissages un peu rudes. Ils seront remplacés par des modèles plus costauds sur une version ultérieure.
1er vol à Rochefort le 8 mai 2014.
Le résultat fonctionne, mais reste à améliorer, car ce cerf-volant n'a pas beaucoup de portance, et donc il doit être en permanence en mouvement pour rester en l'air. Si le vent est suffisant (force 3) il suffit de placer le Rotexa face au vent et d'utiliser la puissance de la motorisation pour faire du sur place avec le cerf-volant en rotation. Dans le cas ou il n'y a pas ou peu de vent il faut faire des cercles en maintenant un niveau de gaz suffisant. En cas de coupure du moteur, c'est la chute immédiate, le Rotexa ne plane pas comme le Delta à Caissons ou le Delta Mono Caisson.
Photos et vidéos BDC HENRI.
![]()
![]()