HEXACOPTERE - 6X
Plateforme vidéo radiocommandée
UAVP (Universal Aerial Video Plateform)
Tout comme pour les prises de vues par cerf-volant, mais aussi simplement le fait de faire des photos ou des vidéos, la règle de base c'est le respect de la vie privée.
Et bien sûr la sécurité des personnes et des biens.
Etape 1
![]()
![]()
Après mes essais de prise de vues avec un quadri rotor (GAUI 330X) le constat est évident c'est beaucoup plus simple et stable que l'utilisation d'un hélico rc de base. De plus, la maintenance est basique pas de réglage de biellettes, de pas collectif, d'anti couple.
En janvier 2012 je me lance dans la fabrication d'un multirotor. Je souhaite quelque chose de simple, avec une certaine masse pour contrer le vent, 6 moteurs pour augmenter la stabilité. La première étape difficile sera de choisir la carte de contrôle. Mes critères, le prix, la disponibilité en France, et pas de prise de tête avec de la programmation tous azimuts.
Je passe de nombreuses heures sur Internet à la recherche des informations qui pourront m'aider sur ce projet.
Mon choix s'arrête sur la carte AQ50D de TMF disponible chez FPV4EVER. Merci encore à Fabien pour ses réponses pertinentes.
Voici les photos des différentes étapes de cette fabrication.

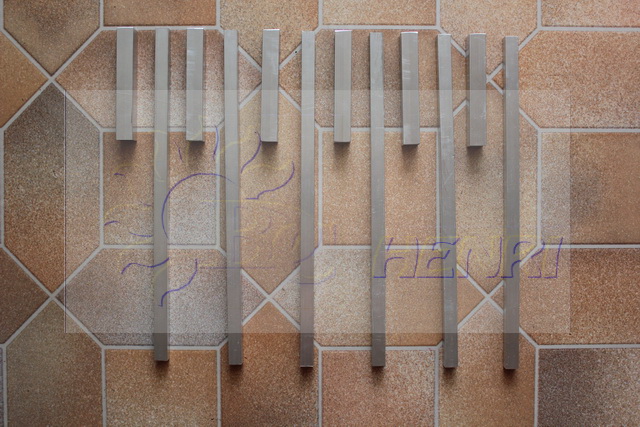
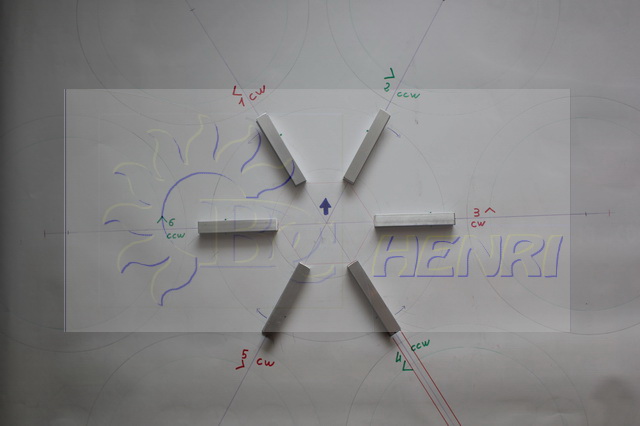
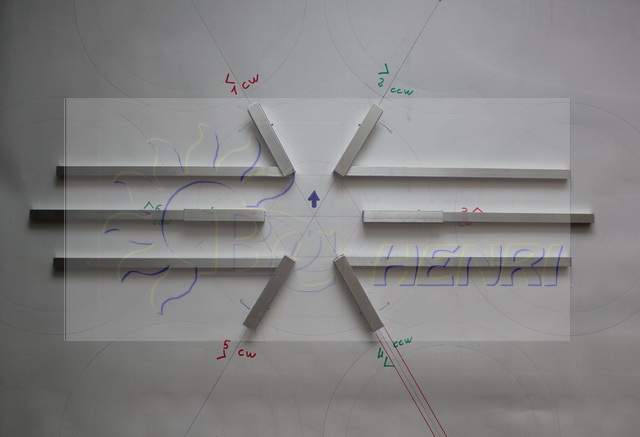
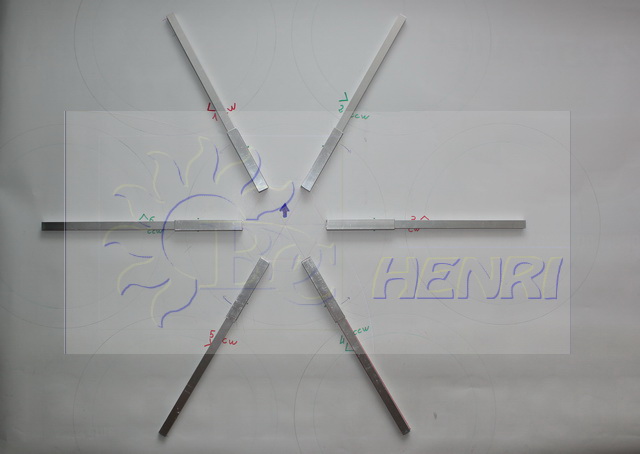
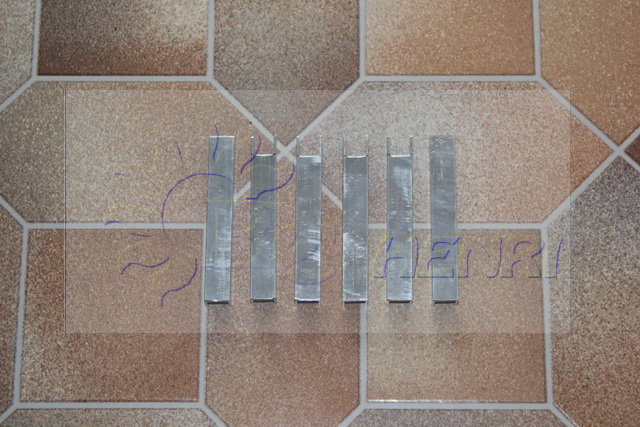
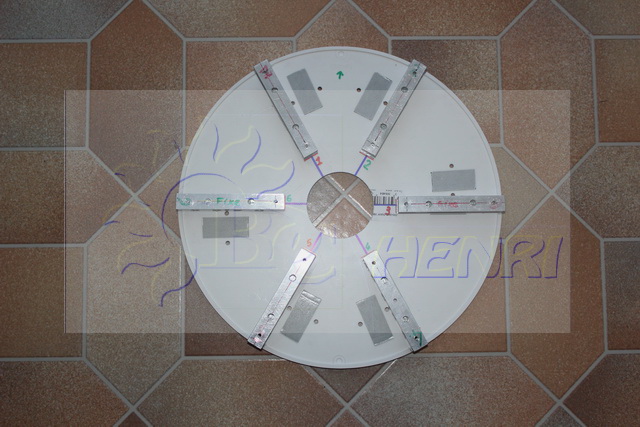
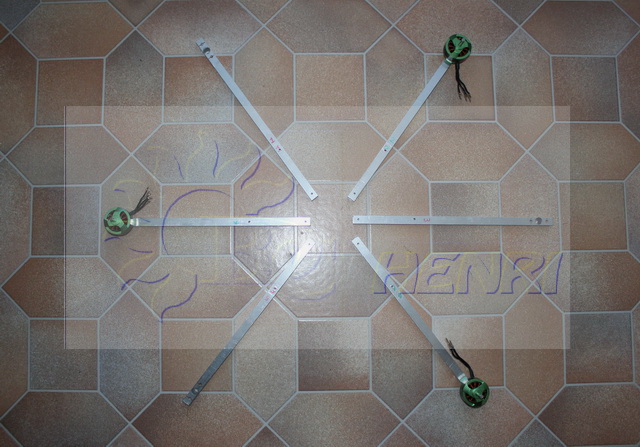
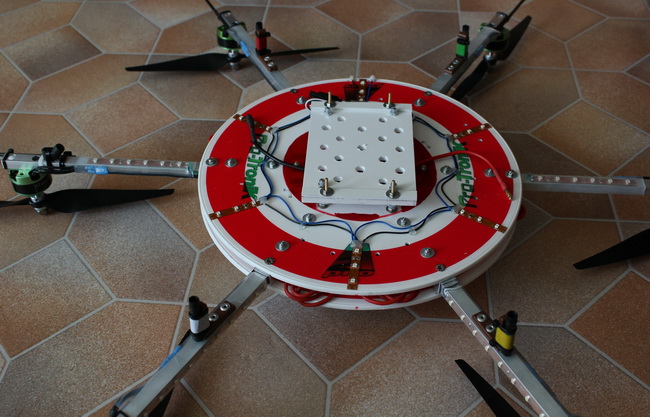
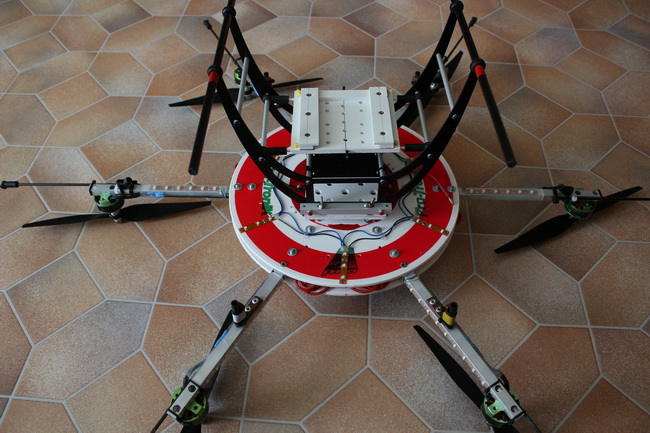
Les composants de base du châssis sont coupés dans des profilés en aluminium. 4 bras repliables afin de faciliter le transport.

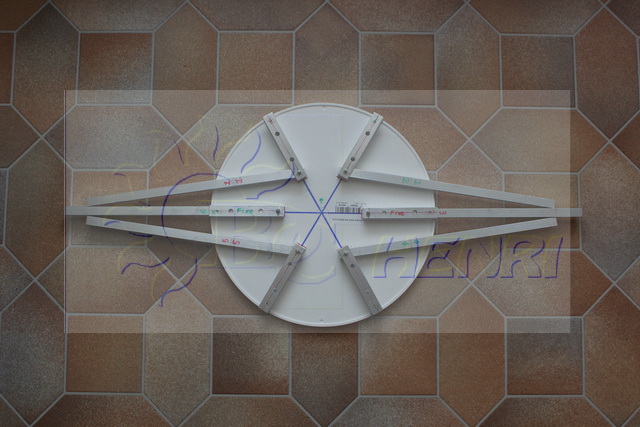
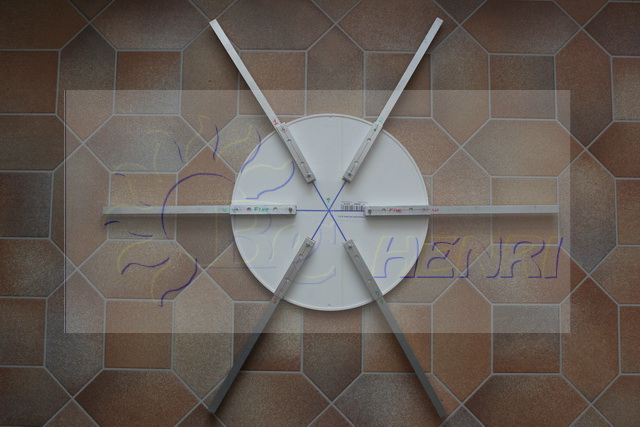
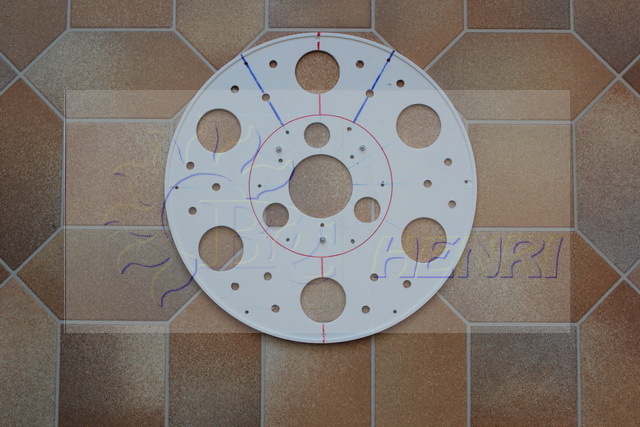
Les deux disques en plastique (30 cm de diamètre) utilisés pour prendre en sandwich la structure en aluminium.



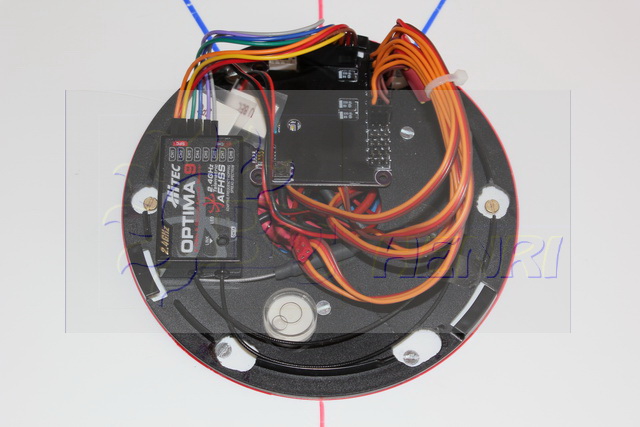
Pour protéger l'électronique utilisation d'une boîte CD.

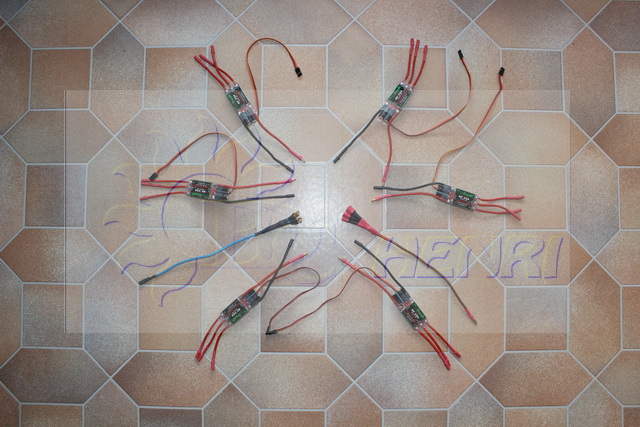
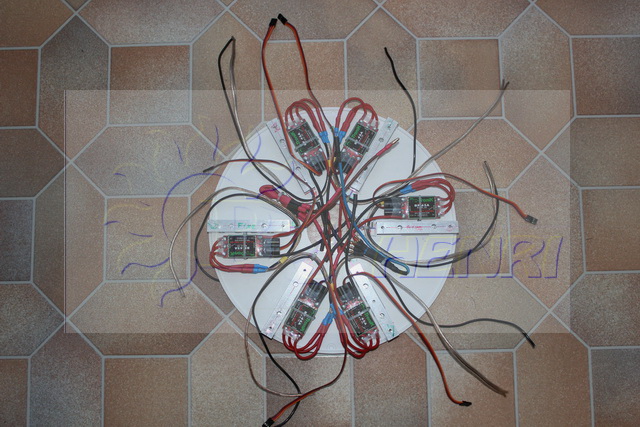
Positionnement de l'électronique (les 6 contrôleurs brushless) et des 3 premiers moteurs.
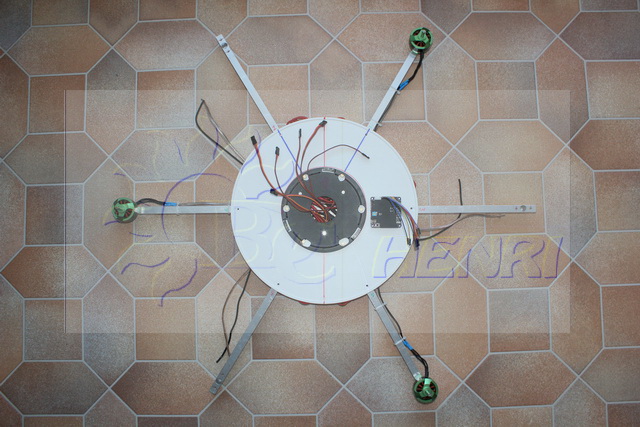
Le cœur du multi rotor la carte AQ50D. Sans elle, rien n'est possible.
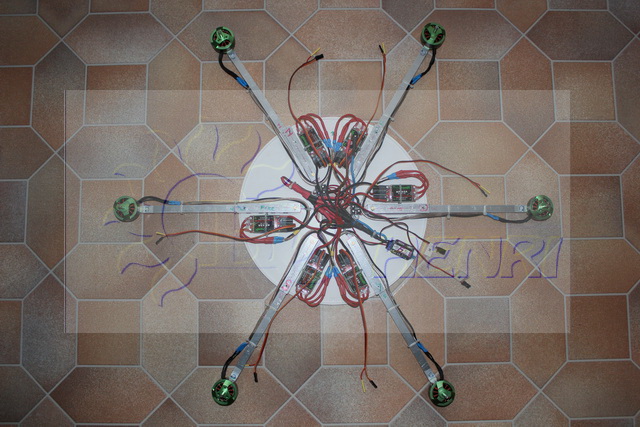



Pour les premiers essais de motorisation, j'ai fixé avec de l'adhésif des blocs de mousse d'emballage de matériel électronique le long des bras. Le multi rotor peut ainsi glisser sur le sol pendant les réglages des différentes voies. Vérification du bon sens de rotation des moteurs et des actions des manches de la radiocommande.

Dessous positionnement provisoire de l'accu, et sur le dessus la partie électronique dans la boîte CD.


Le disque supérieur ajouré pour gagner quelques grammes, c'est plus pour le look que pour le gain de poids.

Premier vol le 9 mars 2012 à PAISANCE (17).

Pas encore de train d'atterrissage simplement les blocs de mousse recoupés sous forme de cube sous chaque bras.

La boîte de transport.



Fiche technique Hexacoptère - 6x
01 août 2012 complément à la fiche technique ci-dessus compte tenu des évolutions du multirotor.
Son poids en ordre de vol avec un accu de 4400 mah = 2700 grammes pour une autonomie de 6 - 7 minutes.
En ajoutant le support caméra (qui inclus un émetteur 5,8 Ghz) et la GO PRO HERO 2) surplus de 450 grammes. Dans cette configuration j'ai paramétré le chrono temps de vol à 4 minutes et une alerte tension basse pour l'accu de propulsion (Télémétrie de base de ma radiocommande HITEC AURORA 9). En général avec un pilotage doux, l'alarme tension basse intervient environ 1 minute plus tard que le signal du chrono temps de vol.
Sur le modèle détaillé ci-dessus voici les modifications effectuées depuis.
Mon choix pour la fixation des hélices était basé sur des supports à pince.
J'utilise ce système sans problème sur les motorisations de mes cerfs-volants radiocommandés. Il est vrai que je démonte après utilisation et remonte l'hélice avant une nouvelle série de vols. Donc le serrage est vérifié systématiquement.
Avec le multi rotor il faut vérifier régulièrement le serrage sinon, cela bouge. Et après une dizaine de vols, une hélice a décidé de se faire la belle, au passage elle a coupé une de ses congénères. Résultat le multi rotor s'est retourné comme une crêpe et s'est vautré lamentablement. Sans dégâts, il était en phase d'approche pour un retour au sol à environ 1m50 d'altitude.
J'ai essayé également le porte-hélice type fixation avec vis pointeau sur l'axe du moteur, mais sans résultat satisfaisant.
Aujourd'hui, j'utilise le système ci-dessous, un porte-hélice fixé directement sur la cloche du moteur.


Bien sûr utilisation de frein filet si écrou traditionnel sinon écrou type Nylstop.
J'ai calculé les dimensions du châssis et sélectionné les moteurs pour pouvoir utiliser 3 dimensions au niveau des hélices. 10, 11 et 12 pouces. Le premier vol a été réalisé avec les 10 pouces. J'ai essayé les deux autres combinaisons. Avec les 12 pouces, c'est plus doux, la descente est plus planée, le bruit est plus feutré. Je n'ai pas utilisé suffisamment longtemps dans cette configuration pour pouvoir juger des performances au niveau accu et durée de vol.
Actuellement le multi rotor est équipé avec des hélices GRAUPNER (renforcée en fibre de verre) E-PROP et E-PROP L 28-12,5 cm/11-5", qui sont un peu plus rigides que celles utilisées pour les premiers vols.
La carte TMF AQ50D PRO
Il s'agit de celle qui est violette, j'ai mis en place l'add_on proposé par TMF qui améliore sensiblement les performances au niveau des capteurs. Mise en place du dernier firmware. Depuis ces modifications je ne recalibre plus les capteurs avant chaque vol. Opération simple à réaliser, mais qui était un peu contraignante. Et il n'y a plus de dérive en vol ce qui nécessitait de trimmer régulièrement pour compenser.
Au 1er août 2012, je suis dans la configuration suivante :
carte AQ50D PRO avec AQ50D-S DS-sensor.
Firmware : TMF_AQ50D-S(V5.6)
Nota : Avec cet add-on sur la carte violette, on ne peut gérer que 6 moteurs au lieu de 8. La nouvelle carte distribuée actuellement intègre directement les nouveaux capteurs et donc il est de nouveau possible de gérer un octocoptère.
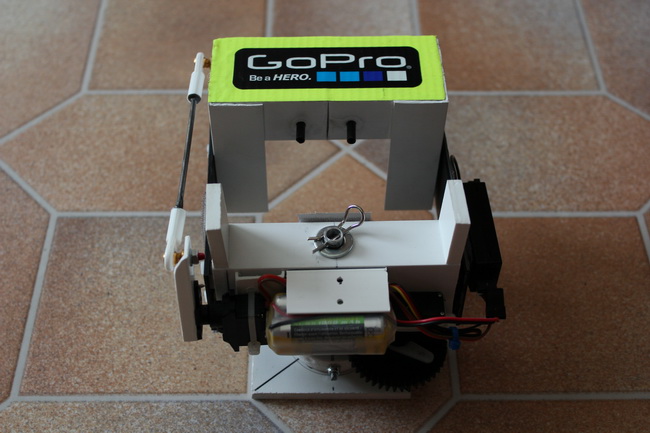
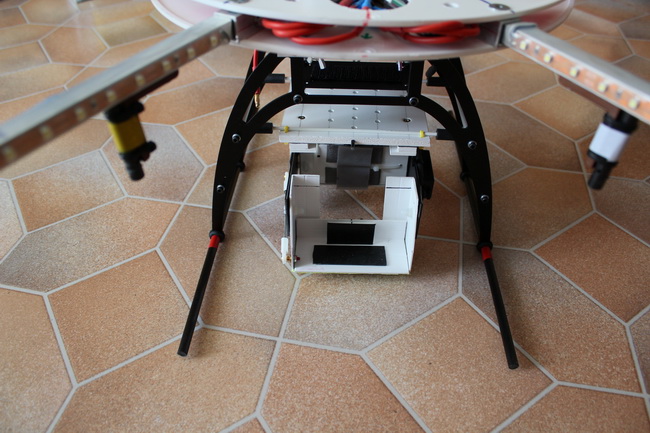
Fabrication d'un support pour la caméra GO PRO. Mes critères, inclinaison verticale et rotation à
360 °. Pour les premières utilisations, la stabilisation n'est pas indispensable.



Sur le pied (acheté en kit) installation de la partie blanche qui est un système à glissières dans lequel se place le support de la caméra présenté ci-dessous.
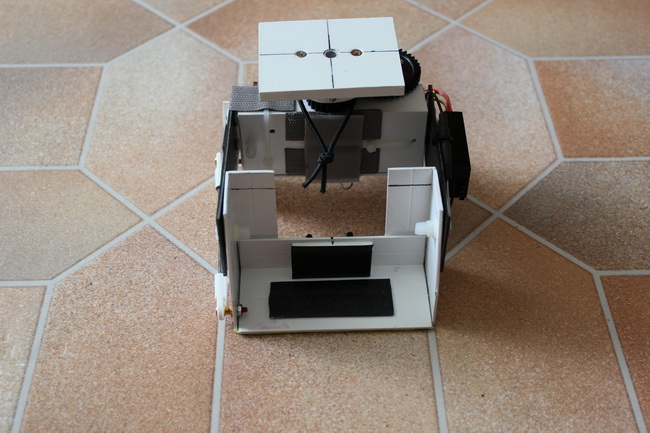
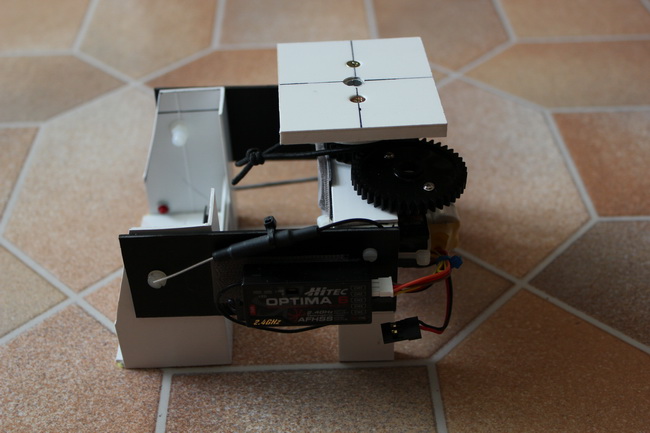
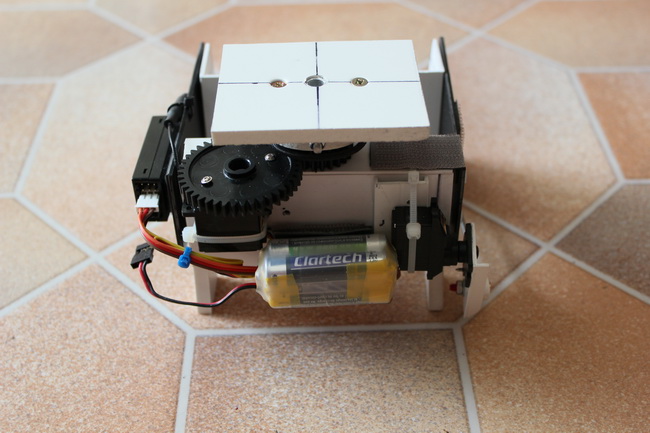
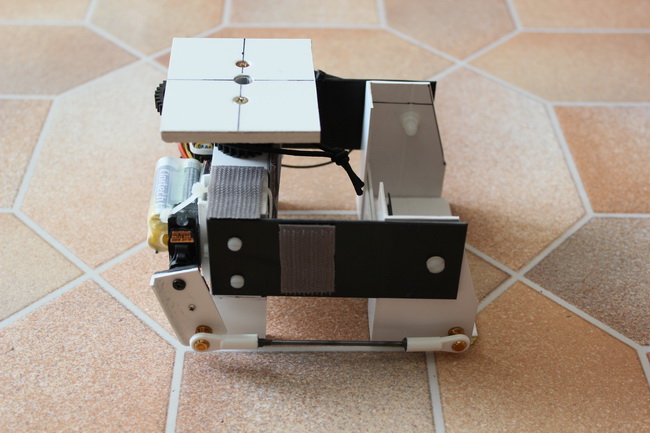
Pour la rotation à 360°, on peut modifier un servo traditionnel, c'est ce que j'ai fait pour mon système de photographie par cerf-volant. Pour ce support caméra j'ai sélectionné un servo destiné aux robots, dans la gamme HITEC Robotics, un HITEC JR/Z HSR-1425CR. Sur les photos le support est équipé d'un servo traditionnel que j'ai utilisé pour faire les essais de base.
Sous le disque inférieur du multi rotor une platine sur laquelle se fixe avec 4 écrous papillon le pied qui sert de train d'atterrissage et qui reçoit le support caméra.


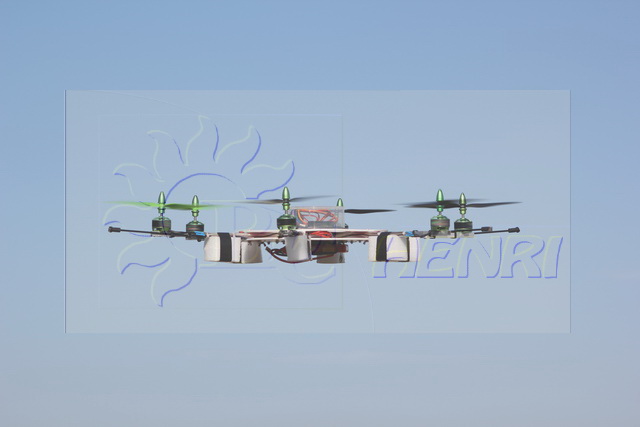
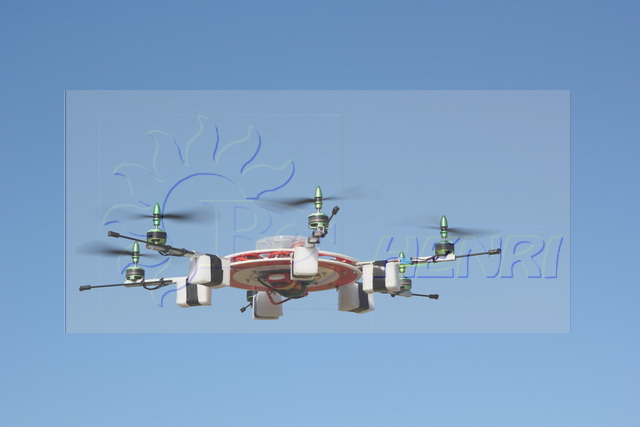
Le multi rotor en vol en version prise de vues avec le matériel présenté ci-dessus.

Ci-dessous les deux pilotes virtuels de l'hexacoptère.






Et bien sûr l'équipement pour les vols de nuit.




Photos et vidéos BDC HENRI.
![]()
![]()